Distributed Fault Tolerant Multi-Robot Area Coverage Under Limited Communication Ranges
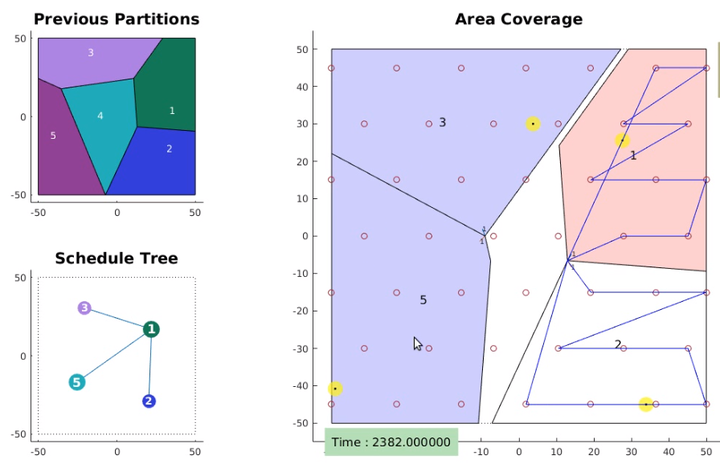
This work develops a distributed fault tolerant area coverage algorithm, resulting in quick detection of the faulty agent under limited communication constraints and redistributes the area without conflicts.